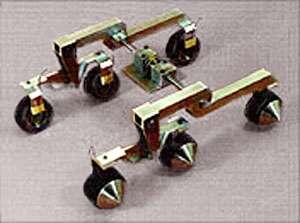
O sistema rocker-bogie é um arranjo de suspensão desenvolvido em 1988 para ser utilizado no rover Sojourner da NASA, e desde então se tornou o design preferido da NASA para rovers. Foi utilizado nas missões dos rovers Spirit e Opportunity da Mars Exploration Rover, em 2003, no rover Curiosity da missão Mars Science Laboratory (MSL) em 2012, no rover Perseverance da missão Mars 2020, e no rover Pragyan da missão Chandrayaan-3 da ISRO em 2023.
**Uma rocker-bogie**
**Em movimento - mostra incorretamente o chassi permanecendo nivelado; na realidade, o chassi mantém a média dos dois rockers.**

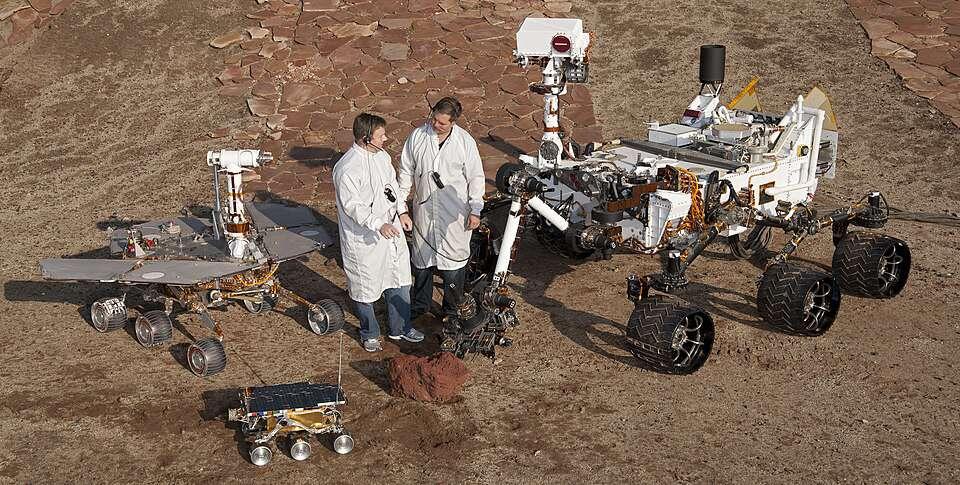
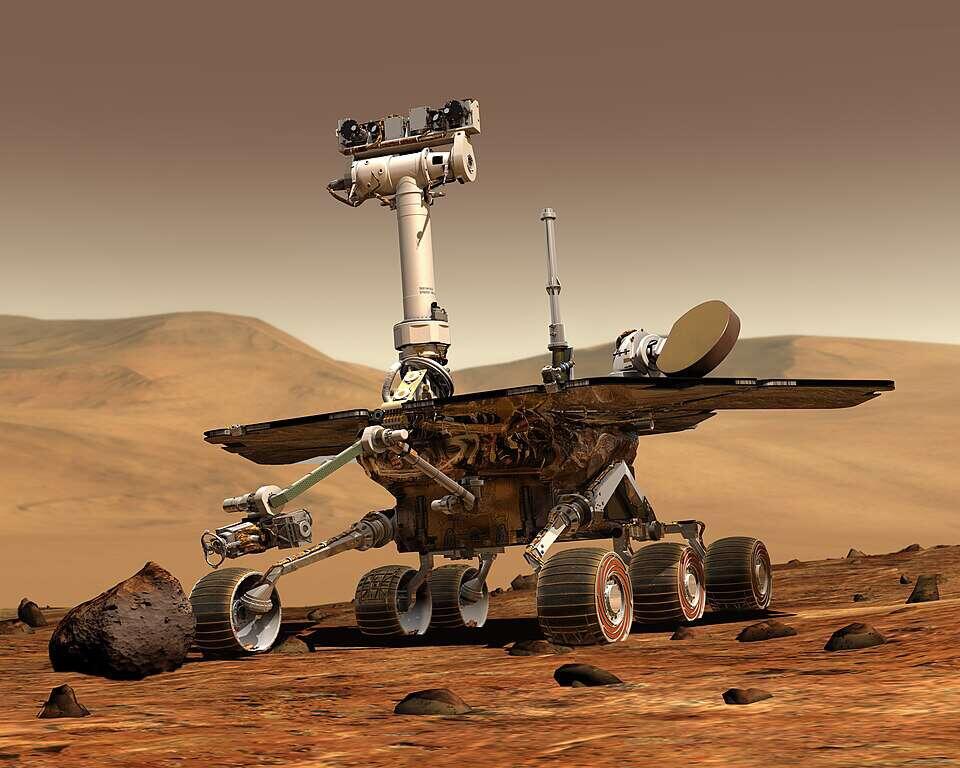
**Rocker bogie no Curiosity**
A parte "rocker" da suspensão vem do aspecto de balanço da ligação maior e montada no corpo de cada lado do rover. Esses rockers estão conectados entre si e ao chassi do veículo por meio de um diferencial. Em relação ao chassi, os rockers giram em direções opostas para manter o contato aproximadamente igual entre as rodas. O chassi mantém o ângulo médio de inclinação de ambos os rockers. Uma extremidade de um rocker é equipada com uma roda motriz, e a outra extremidade é articulada no bogie.
A parte "bogie" da suspensão referese à ligação menor que gira no meio do rocker e que tem uma roda motriz em cada extremidade. Os bogies eram comumente usados como rodas de carga nas trilhas de tanques de guerra, distribuindo o peso pelo terreno, e também eram usados em trailers de caminhões semirreboque. Atualmente, tanto tanques quanto semirreboques preferem suspensões de braço oscilante.
No rover Sojourner, as rodas frontais se conectam aos bogies, enquanto nos rovers MER e MSL, as rodas frontais se conectam aos rockers.
**Mars Exploration Rover** (**MER**)
**Sojourner (rover)**

### Design
O design rocker-bogie não possui molas e usa eixos divididos, em vez de eixos de largura total, permitindo que o rover ultrapasse obstáculos (como pedras) que tenham até o dobro do diâmetro das rodas, mantendo todas as seis rodas em contato com o solo. Como qualquer sistema de suspensão, a estabilidade de inclinação é limitada pela altura do centro de gravidade. Sistemas que utilizam molas tendem a tombar com mais facilidade à medida que o lado carregado cede. Com base no centro de massa, o rover Curiosity da missão Mars Science Laboratory pode suportar uma inclinação de até 45 graus em qualquer direção sem tombar, mas sensores automáticos limitam a inclinação do rover a 30 graus. O sistema é projetado para ser usado a uma velocidade baixa, de cerca de 10 centímetros por segundo, a fim de minimizar choques dinâmicos e danos consequentes ao veículo ao superar obstáculos de grande porte.
O Jet Propulsion Laboratory afirma que esse sistema rocker-bogie reduz o movimento do corpo principal do veículo MER pela metade em comparação com outros sistemas de suspensão. Cada uma das seis rodas do rover Curiosity possui um motor independente. As duas rodas dianteiras e as duas traseiras têm motores de direção individuais, permitindo que o veículo gire no próprio lugar. Cada roda também tem garras, proporcionando aderência para escalada em areia fofa e para atravessar pedras. A velocidade máxima dos robôs operados dessa forma é limitada para eliminar os efeitos dinâmicos tanto quanto possível, de modo que os motores possam ser ajustados, permitindo que cada roda levante uma grande parte da massa total do veículo.
Para ultrapassar um obstáculo vertical, as rodas dianteiras são pressionadas contra o obstáculo pelas rodas centrais e traseiras. A rotação da roda dianteira então levanta a frente do veículo sobre o obstáculo. A roda central é então pressionada contra o obstáculo pelas rodas traseiras e puxada contra o obstáculo pelas rodas dianteiras até ser levantada. Finalmente, a roda traseira é puxada para cima do obstáculo pelas duas rodas dianteiras. Durante a travessia de cada roda pelo obstáculo, o progresso para frente do veículo é retardado ou completamente interrompido. Isso não é um problema para as velocidades operacionais em que esses veículos têm sido utilizados até hoje.
Uma das aplicações futuras dos rovers será auxiliar astronautas durante operações na superfície. Para ser útil, o rover precisará ser capaz de se mover pelo menos à velocidade de caminhada humana. Outras missões propostas, como o Rover Lunar Polar Sun-Synchronous, exigem velocidades ainda maiores (4–10 km/h).